






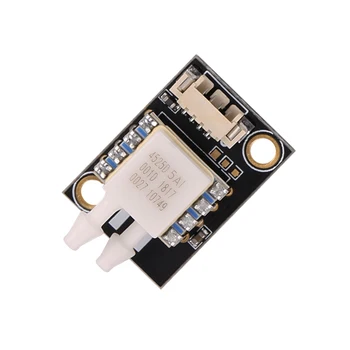





PX4 Diferențială a Vitezei Tub Pitot + Tub Pitot Airspeedometer Viteza Senzor pentru Pixhawk PX4 Zbor Controller
Introducere
ARSPD_BUS a stabilit ca 0,uz intern I2C
ARSPD_SKIP_CAL a stabilit ca 0, de fiecare dată când reporniți controlorul de trafic, necesare pentru calibrarea vitezei metru de offset.Setat la 1, sări automat viteza ecartament offset de calibrare, folosind ultima calibrat offset
ARSPD_TUBE_ORDER a stabilit ca 2,potrivire Automată de partea superioară sau inferioară a tubului este presiunea dinamică
ARSPD_TYPE a stabilit ca 1, utilizarea I2C-MS4525D0
În stația de la sol depanare interfață, observa schimbarea vitezei metru.În general, valoarea sar este de 1-3 în limite normale.Sufla aer la viteza metru.Dacă viteza crește valoarea, viteza contorul funcționează în mod normal.
Imaginea Produsului
Transport Listă
PX4 borad*1
Documentația
Despre
Filtru de go este o creatie robotică și open source hardware producător și exportator specializat în micro-controller, kit de pornire, robot, scut, senzor, display, module, etc. pentru Arduino, Raspberry PI, Micro:bit.
Putem produce pentru OEM sau ODM ordinele.Putem furniza, de asemenea, pentru multe societăți comerciale străine.Fabrica noastra este situat în Shenzhen, bun venit pentru a vizita noastră procesului de producție.
Ca un rezultat de peste 5 ani de experiență fructuoasă și de înaltă calitate produse în industrie .am castigat o rețea globală de vânzare ajungând la peste 100 de țări.
Sku: p493360
Informatii suplimentare
- Origine - China Continentală
- Nume De Brand - QSZNTEC
- model - pixhawk px4
- Tip - Altele
Ratinguri Medii
0 Recenzii pentru acest produs
Adauga un comentariu
Adresa ta de email nu va fi publicată. Câmpurile necesare sunt marcate *
Produse conexe

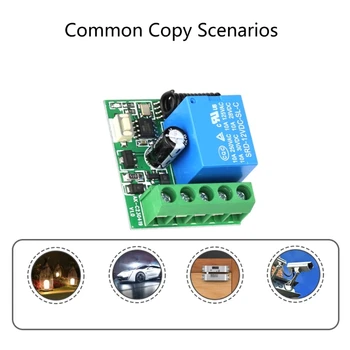
H7JA Profesională Singur Canal de Control de la Distanță RelaySwitch pentru Acasă de Automatizare
caracteristici: ootdty controlul dispozitivelor dvs. cu ușurință folosind această dc12v singur canal relaymodule rf wirelessswitch set. cu o selflock funcție și 433/315mhz frecvență, thisswitch asigură sensibil și puternic

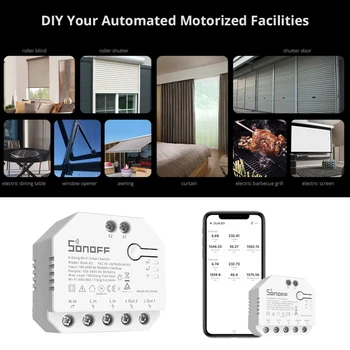
SONOFF DUAL R3 WiFi Comutator Cu Putere de Contorizare DUAL R3 Releu Modulul 2 Banda DIY Acasă Inteligent Comutator Prin intermediul EWeLink Alexa de Start Google
sonoff dual r3 wifi comutator cu putere de contorizare dual r3 releu modulul 2 banda diy acasă inteligent comutator prin intermediul ewelink alexa de start google descriere: sonoff dualr3 nevoie de casa ta la nivelul următor.dualr3 este


În aer liber unde Scurte Antena Ga490 Radio/DST/Malachit Antena Radio cu unde Scurte Nhk Multi-Funcție Convenabilă de Radio Ușor de instalat
suport de dropshipping și comerț cu ridicata. 100% originale și de bună calitate, cu acces gratuit după-vânzare de garanție. 1. ga-490 de înaltă performanță active buclă antena este o antenă cu excelent primit de performanță. 2.


Multifunctional Organ Card Sac de Piele de Înaltă Calitate Plic de Conducere ID-ul Pachet de Mare Capacitate Card Clip
de brand nou și de bună calitate. produs: plic organ bag cardul material: piele pu dimensiuni: 11*2*7.5 cm culoare: așa cum se arată pachetul inclus: 1 x organ bag cardul notă: 1. vă rugăm să




R91A se Potrivesc pentru Aburi-Punte de Jocuri de noroc Tip Accesorii-Adaptor de c & Thumbstick Fixare Capace și Gazdă Spate Suport Consola de Protecție Stabilite
caracteristici: upgrade - vă experiența de joc. design pentru aburi-punte, consola de joc. material de calitate, are o durată lungă de viață, ușor de instalat. asigură un confortabil și stabil experiență de joc. acest


1pair Barbati PU Piele de Toamna si Iarna de Conducere Ține de Cald Mănuși de Lână Tactice Mănuși Negre de Sport în aer liber rezistent la apa Mănușă de box
caietul de sarcini: nou și de înaltă calitate material: pu leaher culoare: așa cum arată și fotografiile dimensiuni:lungime totala 25 cm pachetul include: de 1pair notă: 1. din cauza manuală
Geanta de transport de Mare Capacitate Joc Accesorii Geanta de Protectie Portabila de Protecție geantă de transport pentru Comutator Cablu Adaptor Dock
descriere: 【montarea】: geanta de transport este potrivit pentru a comuta sistemul de joc accesorii. (singurul caz, nu inclusiv accesorii.) 【mare capacitate】: cu sac de depozitare interior caneluri poți ține accesorii de jocuri organizate.în


Fete Drăguț Urechi De Urs De Pluș Simplu Bentițe Copii Minunat Ornament De Par Banda De Păr Cercuri Copii Moda Accesorii De Par Cadou
nou și de înaltă calitate! descriere: 1. design multi-funcțional: acest hairband nu pot fi utilizate numai atunci când spălat fața, dar, de asemenea, fi utilizate în ocazii păr necesită reparații, cum ar fi masca facială și machiaj,
EVA Geanta de transport Pentru Meta Quest 3 set de Căști VR Ocupe de Controler Încărcător de Înlocuire Bandă de Stocare Portabil Sac Curea de Umăr
eva care transportă sac impermeabil caz de călătorie tocul reglabil curea de umăr portabil sac de depozitare rezistenta la socuri anti-scratch pentru meta quest 3 vr gaming headset/touch controler/incarcator/înlocuire bandă de susținere caracteristică: 1.


Femeile Bandane Turban Croșetat Eșarfă De Păr Hairband Tricotate Banda De Păr Banda De Headwrap Accesorii De Par Dropshipping
caracteristici: de brand nou și de înaltă calitate iese în evidență în mulțime cu dulci croșetat de păr batic bandana, perfect pentru adăugarea de culoare la orice tinuta! fabricat din bumbac moale si confortabil fir, acest


2 buc L2R2 TriggerSpring Joc Consola Accesorii L2 TriggerButton Primăvară
caracteristici: ootdty înlocuirea și repararea consola ta cu usurinta folosind butonul de izvoare! cu easyinstallation, acesta oferă o hasslefree mod de a menține joc consola. proiectat pentru gameri și entuziaști deopotrivă,





Femei Bărbați Simplu Turban Benzi Elastice Păr Banda Cu Butoane Pentru Gura, Masca Titularul Adulți Hairband Masca De Fata Fix Extins
stil:fashion/vintage/elegant/cute dimensiune:gratuit dimensiune,cu elastic pachetul inclus:1 buc bentita note: din cauza diferenței între diferite monitoare, imaginile pot să nu reflecte culoarea reală a theitem.sper că puteți înțelege următoarele


MXMB Y2k ' 90 Estetice Inimă de Pluș Ac de păr pentru Femei Adolescenti Girly Farmecul de Par Clip
caracteristici: ootdty poate fi folosit cadouri pentru ziua de nastere, aniversare, de crăciun. inimă de pluș ac de păr se poate purta pe ziua de nastere, petreceri în costume, performanțe școlare și tema photoshot. se




DOHOHDO Petrecere Bărbați Ochelari de Soare 2024 Retro Colorat Ochi de Pisica ochelari de Soare pentru Femei Premium de Metal Moda Vintage Nuante Gafas de sol
1. dacă aveți nevoie de mai multe imagini mobile, vă rugăm să nu ezitați să ne contactați.avem stoc pe ele, va vom raspunde și atașați fotografii imediat. 2. despre transport.în condiții normale de timp, vom transport maritim


Ochelari de Protecție Anti-Albastru Ochelari de Citit Blue Ray Blocarea TR90 Rotund Ochelari de vedere Ultralight Spectacol Optic Ochelari
100% de brand nou și de înaltă calitate. tip:anti-albastru ochelari de citit material:tr90 rame lungime:136 mm lens width: 62mm lens înălțime: 32mm ochelari de picioare lungime:143 mm culoare:negru puterea:+100/+150/+200/+250/+300/+350/+400 stil:anti-blue


VCKA 2024 Nouă Epocă de Acetat de Miopie Rama de Ochelari Bărbați Femei Personalizate baza de Prescriptie medicala Ochelari Retro de Lux Ochelari de -0.5 la -10
maslu : ochelari de miop standard pentru:-1,0 la -6.0 , pd 62-64mm personalizat de informații baza de prescriptie medicala chiar sph:(-0.5~-6.0) astigmatism:(-0.5~-2.0) axa:(0~180) stânga sph:(-0.5~-6.0) astigmatism:(-0.5~-2.0)


Containere Pahare Cutie de Depozitare Ochelari Caz de Ochelari de Citit Cazul Spectacol de Caz din Piele PU cutie de ochelari de Soare Ochelari de Saci
tip de element:piele pu ochelari de sac material: pu stil: simplu culoare: albastru,negru,violet,maro,gri,verde,roșu,alb dimensiuni:17.5*7.5 cm .potrivit pentru: unisex ambalare: 1 buc ochelari de caz(nu include

Laptop CPU de Răcire Ventilator Pentru HP 15-DB Racirea CPU Fan DC28000JLF0 FS470805CLOT L20474-001 Înlocuire Piese de Schimb, Accesorii
suport de dropshipping și comerț cu ridicata. 100% originale și de bună calitate, cu acces gratuit după-vânzare de garanție. specificatii de noul cpu fan pentru hp 15-db serie stare: nou p/n: dc28000jlf0 fs470805clot


Pentru Oculus Quest 3 Display Stand Cască VR Titular Pentru Postul de Meta Oculus Quest 2 / Pico 4 VR Accesorii Piese Negru
compatibil cu pentru quest 3 / pico 4 / quest 2 căști vr păstrează-ți ochelari vr, controlere si link-ul de cabluri frumos într-un singur loc durabil, de înaltă calitate material anti-zero silicon suprafata platforma culoare:negru/alb material:plastic conținutul
De înaltă calitate Adaptorul de Alimentare de Transfer Adaptor Cablu Convertor pentru Xbox360 pentru Consola XBOX One
de înaltă calitate adaptorul de alimentare de transfer adaptor cablu convertor pentru xbox360 xbox 360 la xbox one consola caracteristici: -100% de brand nou -calitate inalta -greutate redusă și ușor de utilizat -pentru